IEEE Transactions on Sustainable Energy · 2022
Robust tube-based model predictive control for wave energy converters
Yujia Zhang et al.
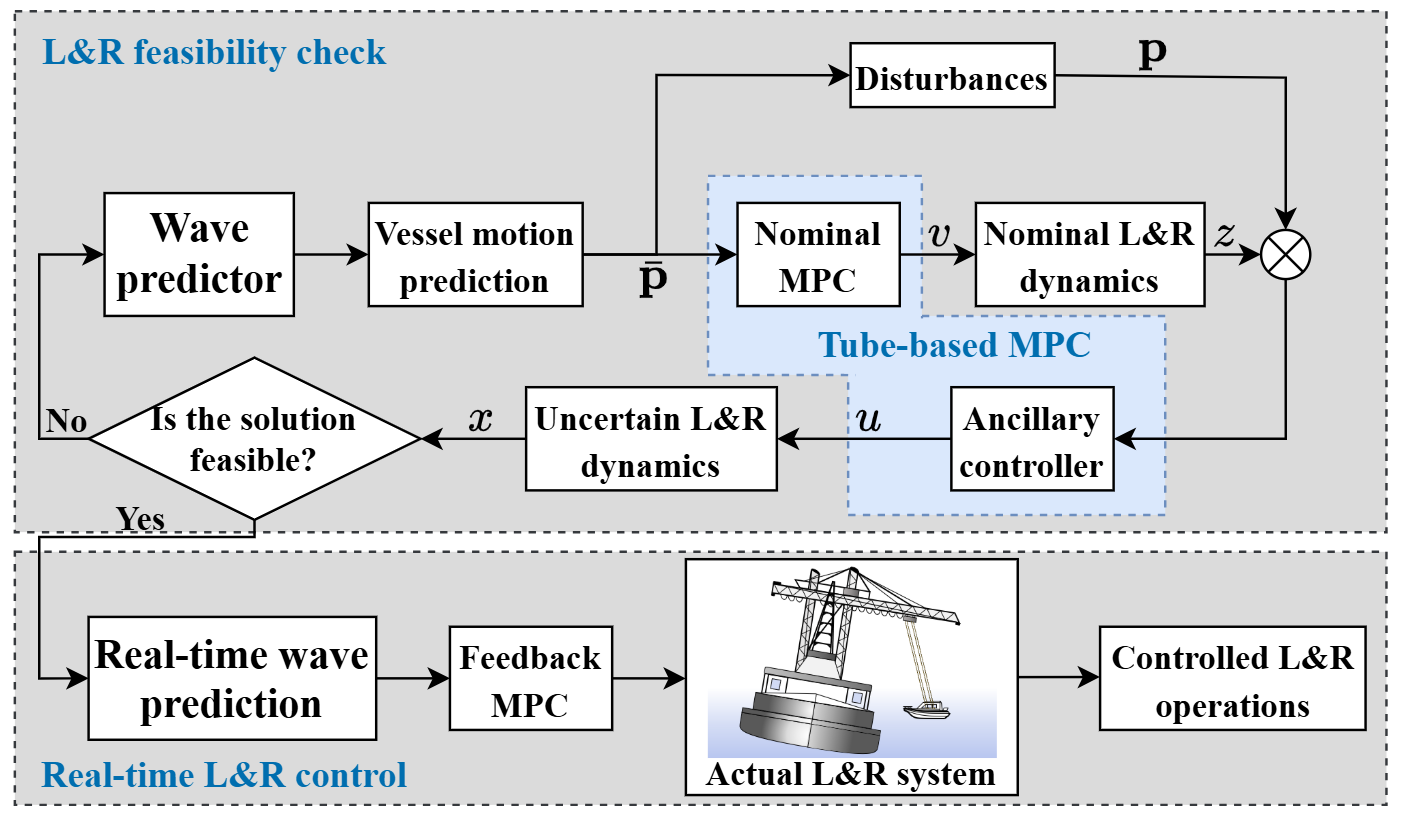
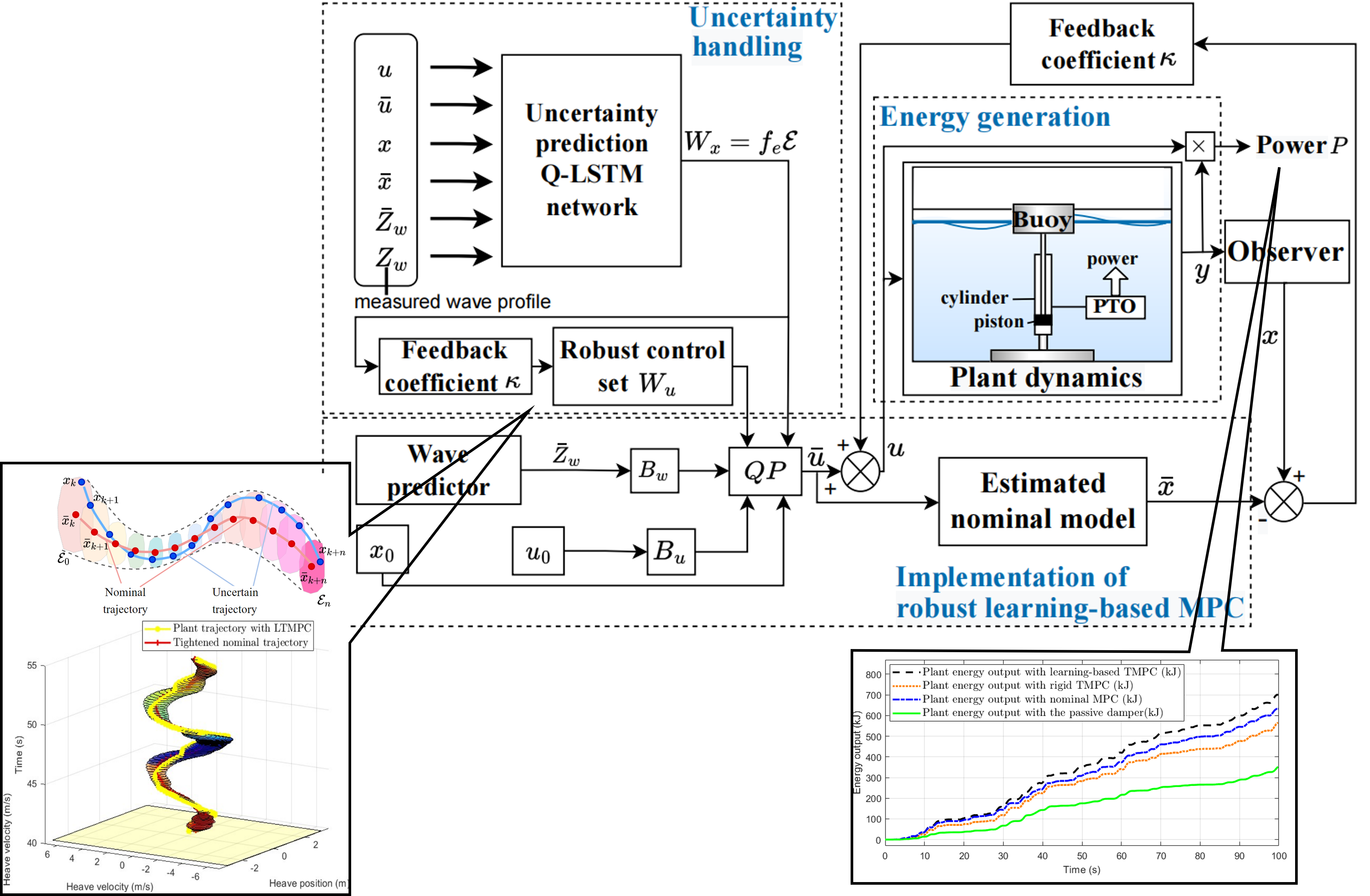
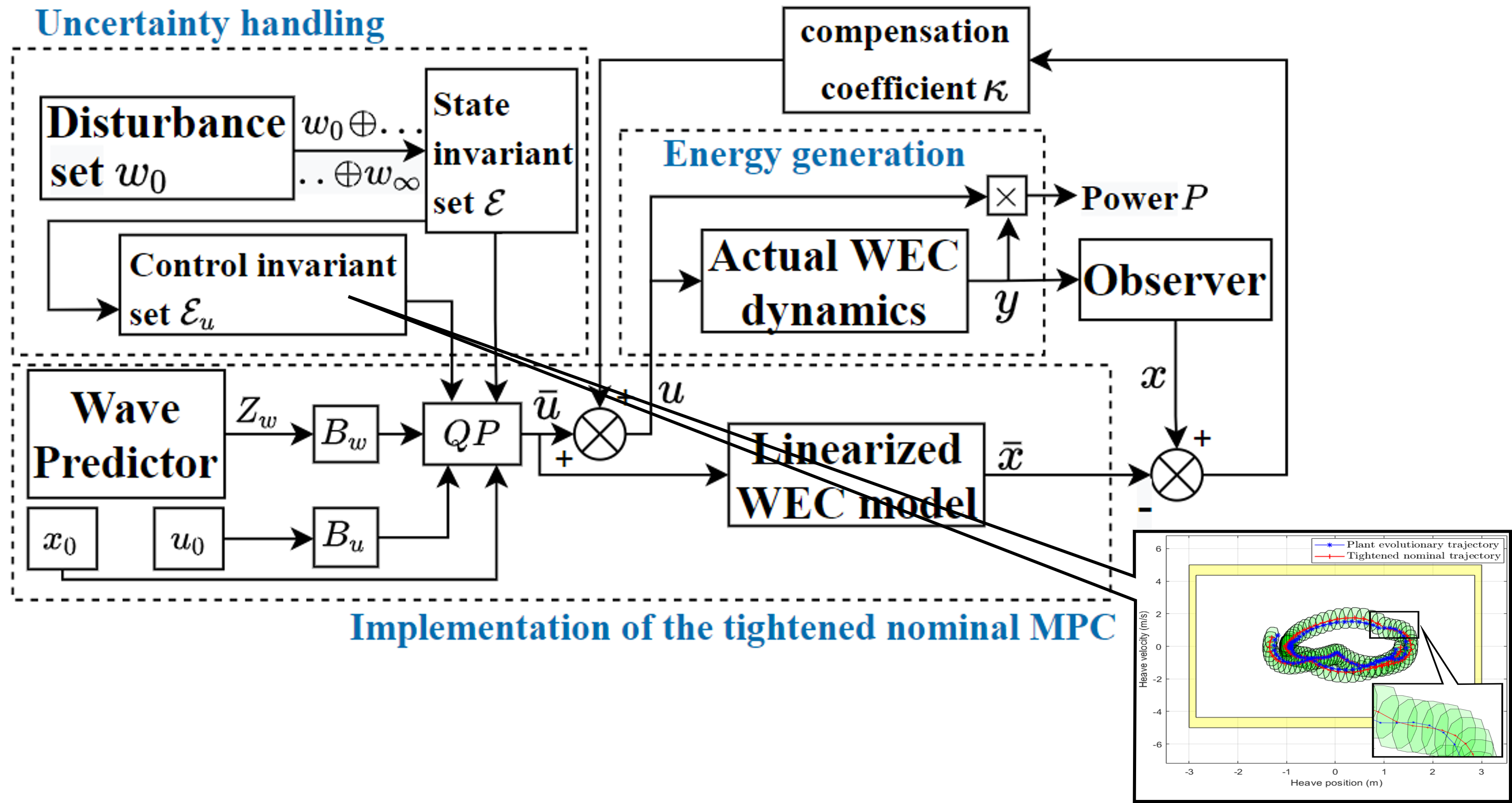
Developed a robust tube-based Model Predictive Control (RTMPC) strategy for energy maximization in Wave Energy Converters (WECs), addressing constraints and model uncertainties.
Methodology
Integrated disturbance invariant sets into the MPC framework to explicitly handle uncertainties and ensure robustness without increasing computational complexity.